This is LoCoBot of project detail


Project information
- Project: LoCoBot competition
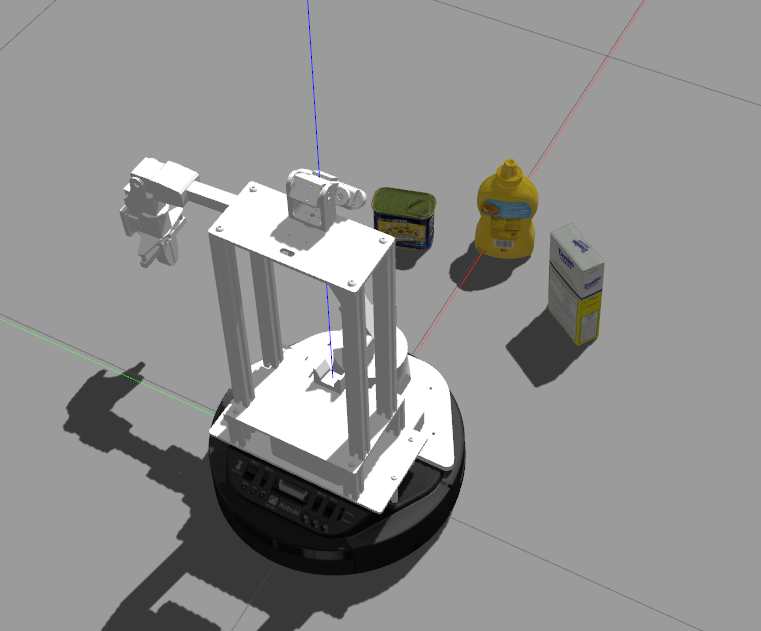
- Robot: LoCoBot
- Sensor: D435
- Simulated environment: Gazebo
- Program: Python, ROS
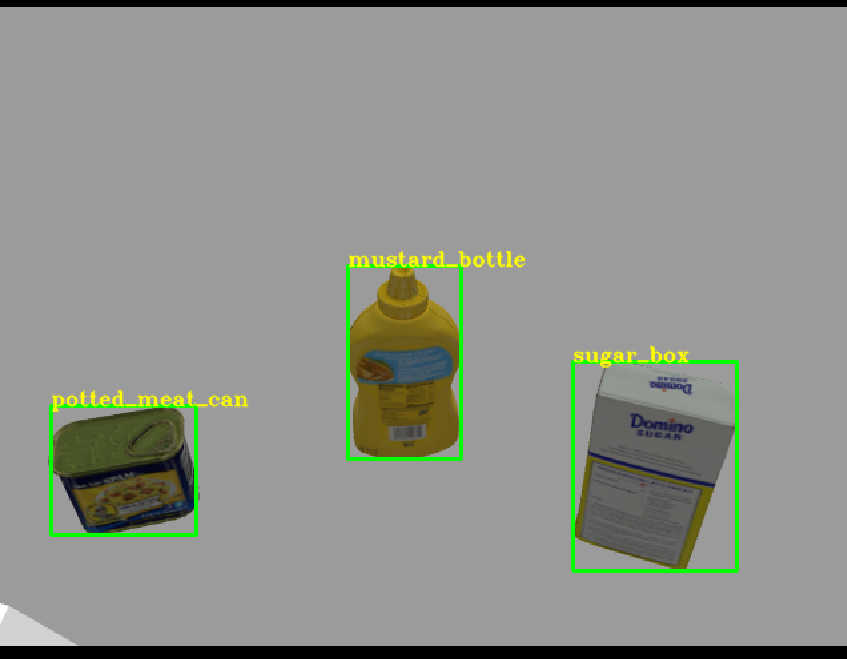
- Responsibilities: Detection, grasping
This competition we need to use LoCoBot to nish four tasks: detection, grasping, navigation and placing in the real environment. In addition, we also design a simulated environment in gazebo when we are TA.