This is UR5 of project detail
Project information
- Project: Grasping with SSDRL
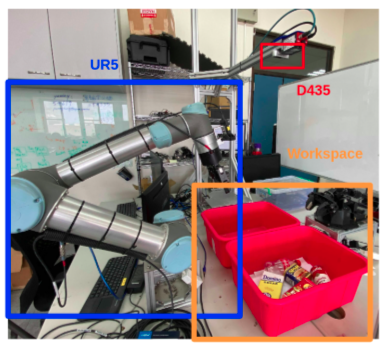
- Robot: UR5
- Sensor: D435
- Program: Python, PyTorch, ROS
- Responsibilities: Software and hardware integration, Program design
Using Deep reinforcement learning to grasp objects in a cluttered environment to another bin with a self- supervised method, and train a real robot UR5 to execute this manipulation.